Tristan Linn
22 DoF Robotic Hand
May 2022 - July 2022
Summary
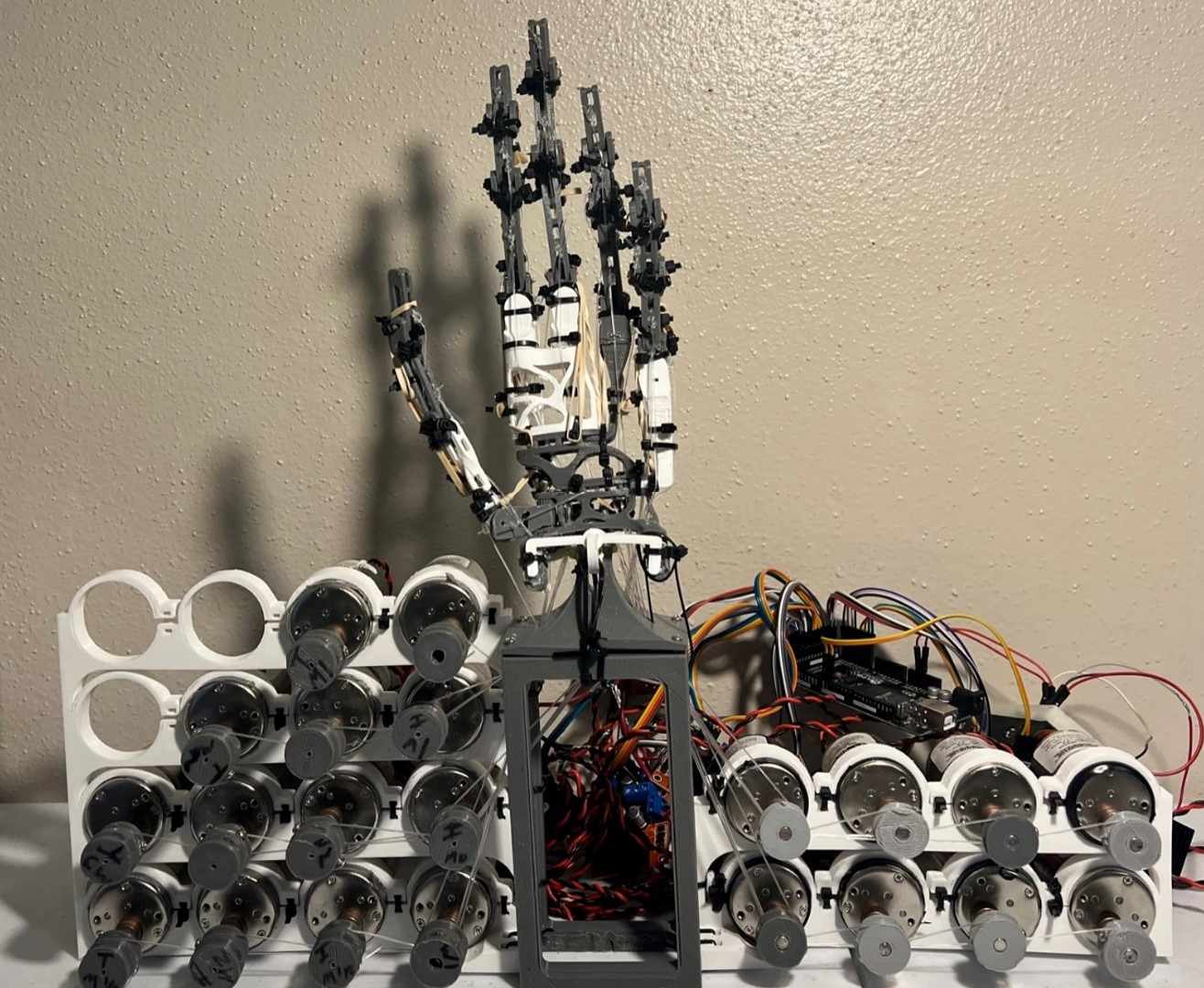
The 22 DoF Robotic Hand project is a fully mechanically actuated hand with 22 Degrees of Freedom that focuses on discovering the mechanical restrictions and complexities of actuating biomimetic movement. The project goes through three prototypes and is modeled in Fusion 360 to be completely 3D-Printable, except the electronics and actuator cable. The project goals are to find the requirements necessary to articulate like a hand and then find the actuator restrictions necessary to fit within a forearm. The project focused on prototyping and discovering key design features to be utilized in future improvements and iterations.
Project General Gallery
Close up renders of the physical prototype and general assembly.
22 DoF Robotic Hand Overview and Drawing Package PDF
Click Here to download a pdf attachment of an in depth overview, assembly, drawings, initial sketching, and construction of the 22 DoF Robotic Hand.