Tristan Linn
Kinetic Quadruped Model
January 2022
Summary
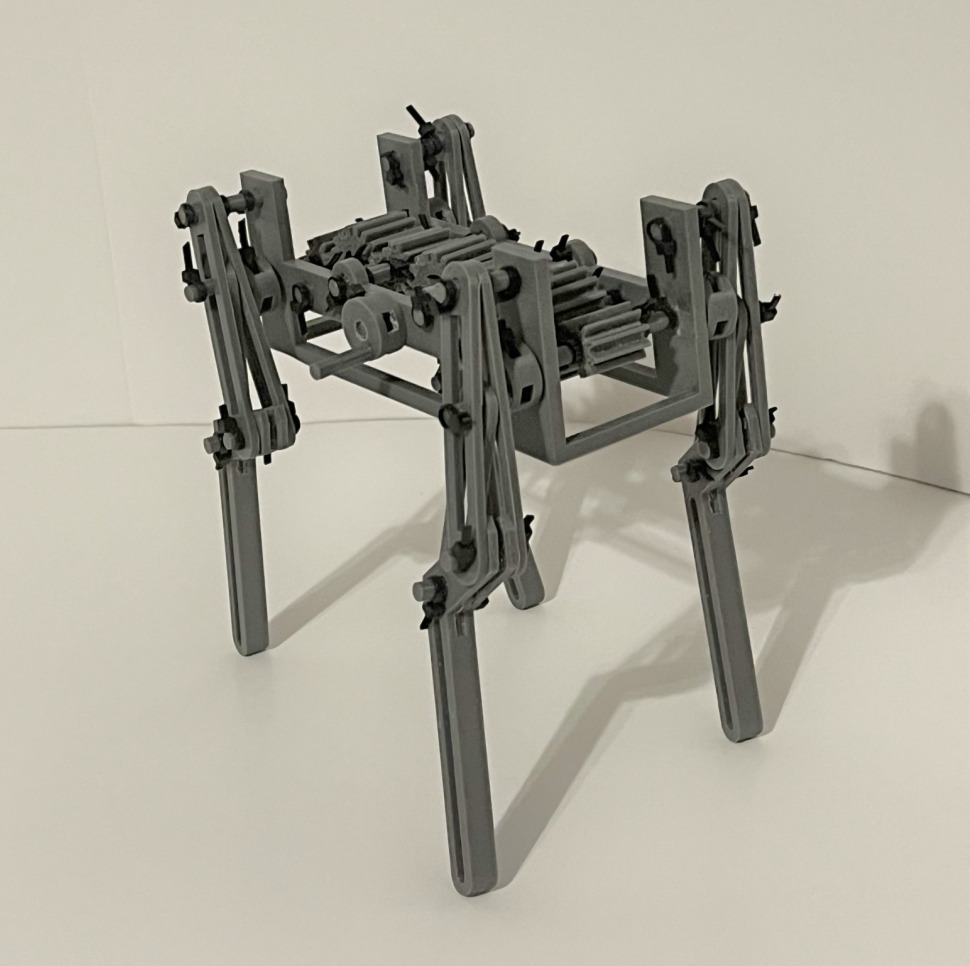
The Kinetic Quadruped model is a 6" tall kinetic model inspired by Boston Dynamics' Spot robot. The model is powered by a hand crank and can move its legs in sequence when turned. The project is a 108 part assembly (including zip ties, 47 excluding) with 10 unique parts all modeled in PTC Creo 7.0. The project took 14 hours to model, 3 hours to assemble, and is entirely 3d-printable except the zip-ties. The model exploded view and general assembly can be seen below.
Project General Gallery
Close up pictutes of the assembled model.
Kinetic Quadruped Project PDF
Click Here to download a pdf attachment of an in depth galley of the Kinetic Quadruped Model, prints, and exploded view.